本文是一篇计算机论文,本文主要对麻雀搜索算法进行了改进,并对机器人路径规划问题进行了研究,通过仿真实验验证了改进麻雀算法在函数寻优和路径规划问题上的有效性,为移动机器人路径规划问题提供了一种更加有效的解决方案,使其可以面对日益复杂的系统优化问题以及高难度的移动机器人路径规划问题。
1 引 言
1.1 选题背景及意义
随着时代的发展,传统制造业面临着诸多的挑战,智能自动化成为新一轮的发展趋势。作为科技革命与产业变革的关键驱动力,智能制造的实质在于运用数字化与信息化手段,实现产效提升、成本优化及品质改进。随着新一轮产业结构变革的推进,自主移动机器人的研究日益深化,其不仅代表一个企业的科技实力,更与人们的日常生活及工作紧密相连。移动机器人已在仓储物流[1]、医疗配送[4]、农业巡检[6]等多个领域得到广泛应用。
在仓储物流方面,移动机器人已经代替了大多数的人工,它们可以进行货物的识别以及端对端的服务,应用移动机器人的仓库明显效率高于人工仓库,且省时省力省钱。在医疗领域,移动机器人承担着医院内部药品、检验样本及手术器械的自动化运输任务,有效减轻了医务人员的工作负担,同时促进了医疗服务水平的提升。在农业方面,智能机器人配备传感器开展田间作业,实时采集作物生长数据、施肥效果及病虫害情况,有效解决了农田作业方面效率低下,产能低下等问题,全面推动推动农业发展。
移动机器人关键技术包括环境识别[8]、路径优化[9]与运动调控[10]。在移动机器人自主导航中,路径规划技术扮演着核心角色,其性能优劣直接关系到设备的运行效能与安全保障。尽管经典算法如A*算法与Dijkstra算法在固定场景下具备良好的适应性,但在应对动态环境时往往陷入局部最优困境,且运算速度难以满足即时响应需求。为此,研究更为高效、快速且稳定的路径规划方法显得尤为重要。
..............................
1.2 选题的国内外研究现状
在国内,移动机器人路径规划的研究主要就在传统算法的改进。何朝伟等[12]人于2019年对A*算法进行了改进,主要通过基于加权A*的次优性边界搜索的基础上使用不一致状态重构A*算法框架的改进方法,提升了算法在动态和复杂环境中的表现。赵迪等[13]人于2023年将粒子群优化算法改进并应用于移动机器人路径规划,并结合模拟退火和遗传算法进行改进。该算法在解决复杂路径规划问题时表现出色,尤其是在多目标路径规划和动态环境中展现了优越的性能。潘传超等[14]人利用深度强化学习训练机器人在复杂环境中的路径规划能力,通过设计合理的奖励函数,使机器人能够自主学习并规划最优路径。该方法通过神经网络模型对环境进行建模,机器人可以根据环境变化进行动态调整,表现出强大的适应能力和鲁棒性。孙立香等[15]人提出人群环境中基于深度强化学习的移动机器人避障算法。该算法首先针对深度强化学习算法中值函数网络学习能力不足的情况,基于行人交互对值函数网络进行改进,使机器人能够在复杂环境中避开障碍物并规划路径。这一研究不仅提高了机器人的避障能力,还为路径规划提供了更加智能和高效的解决方案。多机器人系统的路径规划研究在国内也得到了广泛关注。肖国宝等[16]人提出了一种新型协作多机器人路径规划算法,通过融合免疫协同进化算法与人工势场法解决全局路径规划与局部路径规划问题,以有效提高机器人的全局协调能力及自适应水平。研究表明,多机器人系统在协作路径规划中能够更有效地完成复杂任务,特别是在任务分配和路径冲突解决方面表现出色。李力等[17]人则提出了基于多传感信息融合的移动机器人定位与环境感知技术。通过融合激光雷达、超声波和视觉传感器的数据,机器人能够准确地构建环境地图并进行路径规划。这一技术在提高环境感知精度和路径规划效率方面具有重要意义,为实现机器人在复杂动态环境中的自主导航提供了技术支持。戈一航等[18]人将麻雀搜索算法改进并应用于移动机器人路径规划,通过引入方向因子,显著提高了算法的性能。
..................
2 机器人路径规划概述
2.1 移动机器人系统概念
移动机器人系统是由传感器、遥控器和自主控制移动机器构成的,且在执行目标任务时,能够控制自己移动的系统。这种系统在一些特殊环境下可以代替人类进行避免危险的操作。
移动机器人的路径规划方法可根据环境信息的获取程度分为两类:全局路径规划和局部路径规划。全局路径规划基于完整的环境信息进行路径计算,属于静态规划范畴,其优势在于能够获得整体环境中的最优路径方案。而局部路径规划适用于环境信息不完全或未知的情况,属于动态实时规划,主要依赖机器人自身的传感系统实时探测周边障碍物,核心功能是实现避障规划。两种方法各有侧重,适用于不同的应用场景。
移动机器人的路径规划方法可根据环境信息的获取程度分为两类:全局路径规划和局部路径规划。全局路径规划基于完整的环境信息进行路径计算,属于静态规划范畴,其优势在于能够获得整体环境中的最优路径方案。而局部路径规划适用于环境信息不完全或未知的情况,属于动态实时规划,主要依赖机器人自身的传感系统实时探测周边障碍物,核心功能是实现避障规划。两种方法各有侧重,适用于不同的应用场景。
..........................
2.2 环境模型
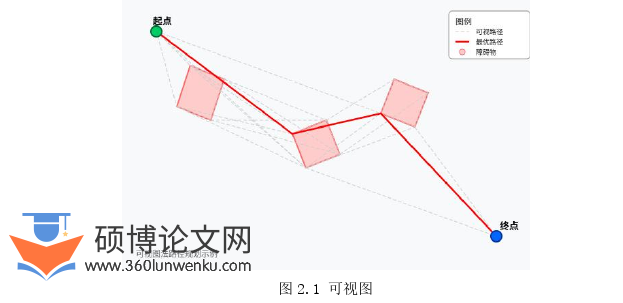
(1)可视图
可视图法[65]适合处理障碍物为多边形障碍物的情况。在运用可视图法时,将机器人简化为一个质点,并将质点、目标点及多边形障碍物的顶点连接到一起。在这个过程中要保证质点与障碍物顶点、目标点与障碍物顶点及障碍物顶点间的连线不穿越障碍物,即保持直线。随后,最优路径规划问题转变为在这些直线中寻找从起点到目标点的最短距离。图2.1展示了可视图方法的一种地图模型。该方法具有直观、容易理解的特性,但也存在着缺点:当起点或终点变动时,需重建地图模型,灵活性不足且具有局限性。此外,其计算复杂度随障碍物增加而上升,且无法保证总能找到最佳路线。
计算机论文怎么写
...............................
3 基于拉丁超立方采样改进麻雀算法 ··························· 21
3.1 改进麻雀搜索算法的三种策略 ································ 21
3.2 LHSSA的执行步骤······································ 22
4 基于拉丁超立方采样改进麻雀算法的机器人路径规划 ························ 41
4.1 地图建模 ·································· 41
4.2 LHSSA机器人路径规划算法步骤 ···························· 41
5 总结与展望 ····································· 45
5.1 论文总结 ··········································· 45
5.2 研究展望 ··························· 45
4 基于拉丁超立方采样改进麻雀算法的机器人路径规划
4.1 地图建模
本章节建立地图环境模型的方法为栅格地图法。栅格地图法最初由Howden 提出[77],本文中的栅格地图中,有关地图环境障碍物的表现形式以黑白方块表示,构建地图首先需确定地图范围,设地图长为L,宽为W,栅格为边长为t的正方形,则地图中横向有L/t个栅格,纵向有W/t个栅格,则整个地图信息如式(4-1)所示。
计算机论文参考
本文中0代表自由路径区域,1 代表障碍物,即不可通过区域。如图 4.1 所示,黑色方块表示不可通过区域的障碍物,白色方块是表示可通过区域的自由空间。
........................
5 总结与展望
5.1 论文总结
随着路径规划问题规模的不断扩大,传统算法已经难以满足复杂优化问题的求解需求,因此寻求高效的优化算法是路径规划领域的研究重点。本文通过对基本麻雀搜索算法的分析,针对麻雀搜索算法的不足之处做出改进。主要内容如下:
(1)首先,分析了国内外对麻雀搜索算法研究现状,分析了麻雀算法研究领域对麻雀算法的改进策略。其次,介绍了机器人路径规划的发展形势,分析了常见的研究路径规划的建模方法。
(2)主要介绍了机器人路径规划的相关背景和理论知识,熟悉和了解机器人系统,以及分析了各个路径规划算法的优劣,并将每个路径规划算法应用到机器人路径规划中做了仿真实验。
(3)介绍三种策略对麻雀搜索算法进行改进,首先,通过引入拉丁超立方采样改进初始化种群策略,其次,通过动态调整安全系数策略对麻雀探索者位置更新公式进行改进。最后,融合蛇优化算法进行扰动策略对基本麻雀算法进行优化。此外,描述了改进的麻雀算法的算法流程及执行步骤,将改进后的麻雀搜索算法在CEC2022基本测试测试函数上进行算法性能测试,与其它改进的算法和标准麻雀算法对比,改进的麻雀搜索算法的收敛性和稳定性更好。而且对实验数据进行了秩和检验,分析得出改进算法在很多测试函数上性能略优于对比算法。对三种策略拉丁超立方采样改进初始化种群策略、动态调整安全系数策略以及融合蛇优化算法进行扰动策略进行消融实验,实验表明,三种策略均对算法改进具有正向优化作用,从而说明三个策略对算法改进的有效性。
参考文献(略)